-
 Русский
Русский
- Metric (mm, Kg, ℃)
Объяснение символов
Ws = Нагрузка на вращающемся колесе
Wf = Грузоподъемность фиксированных колес
WT = Максимальный вес груза коляски
P = Вес коляски
Ниже приведены все возможные варианты расположения колес коляски:
Вариант A
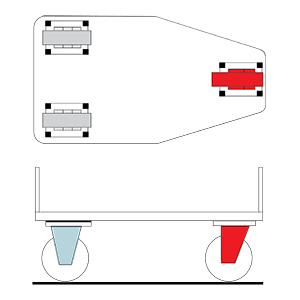 |
2 фиксированных + 1 вращающийся
Предпочитаются для небольших гибких структур с низкой нагрузкой Управление со стороны вращающегося колеса Ws= (WT+P) x 0,4 Wf= (WT+P) x 0,35 |
Вариант B
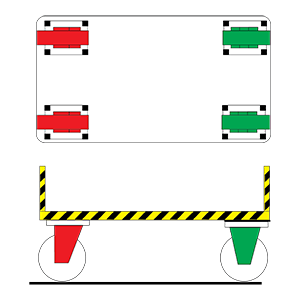 |
2 вращающихся + 2 фиксированных на краю колеса
Предпочитаются для тележек с относительно высокой нагрузкой и для больших расстояний. Управление со стороны вращающегося колеса Ws= (WT+P) x 0,35 Wf= (WT+P) x 0,35 |
Вариант C
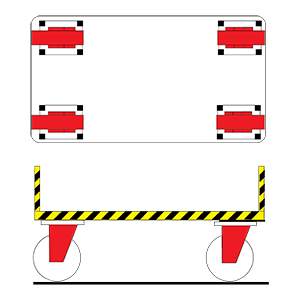 |
4 вращающихся на концах тележки
Предпочитаются для тележек, которые требуют максимальную гибкость, но и для тележек с высокими нагрузками и на не большие расстояния . Управление с любой точки. Ws= (WT+P) x 0,35 |
Вариант D
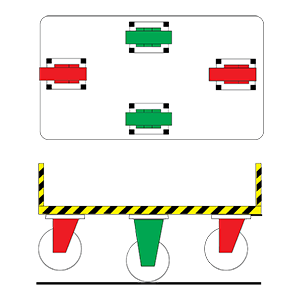 |
2 вращающихся + 2 фиксированних в середине каждой стороны тележки (гондолы)
Предпочитаются для гибкой конструкции на большие расстояния и для полов с каналами и пандусы. Управление со стороны вращающегося колеса Ws= (WT+P) x 0,35 Wf= (WT+P) x 0,50 |
Вариант E
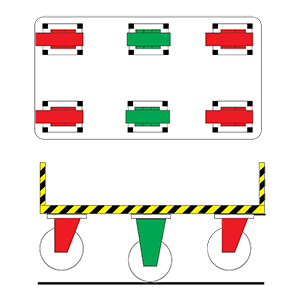 |
2 фиксированых на середине длинной стороны и четыре по краям вращающейся тележкой
Предпочитаются для гибких и устойчивых конструкций, на большие расстояния и для полов с каналами и наклонной плоскости. Управление со стороны вращающегося колеса Ws= (WT+P) x 0,35 Wf= (WT+P) x 0,50 |
Вариант F
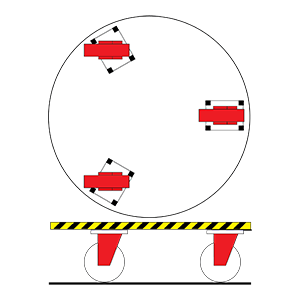 |
3 вращающийхся в треугольной конфигурации.
Предлагаемые для круговой телеги и бочки Ws= (WT+P) x 0,35 |

Примечание:
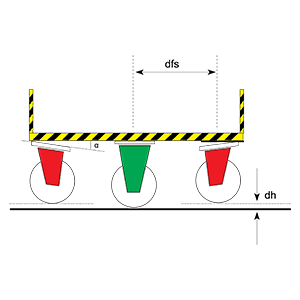
Для вариантов D и Е пластины стержень не должен быть параллельным на основании но должно иметь относительного наклона и находится в горизонтальном положении, как колесо касается
εφa = DH / DFS, где
DH = общий перепад высот с вращающихся и неподвижных колес.
DFS= расстояние между отверстиями пластины из вращающегося колеса и отверстия пластины фиксированного колеса.
O нас
Свежие новости
